2 minutes
2019LeetCode秋季全国赛3. 机器人大冒险.
力扣团队买了一个可编程机器人,机器人初始位置在原点(0, 0)。小伙伴事先给机器人输入一串指令command,机器人就会无限循环这条指令的步骤进行移动。指令有两种: U: 向y轴正方向移动一格 R: 向x轴正方向移动一格。 不幸的是,在 xy 平面上还有一些障碍物,他们的坐标用obstacles表示。机器人一旦碰到障碍物就会被损毁。 给定终点坐标(x, y),返回机器人能否完好地到达终点。如果能,返回true;否则返回false。 示例 1: 输入:command = “URR”, obstacles = [], x = 3, y = 2 输出:true 解释:U(0, 1) -> R(1, 1) -> R(2, 1) -> U(2, 2) -> R(3, 2)。 示例 2: 输入:command = “URR”, obstacles = [[2, 2]], x = 3, y = 2 输出:false 解释:机器人在到达终点前会碰到(2, 2)的障碍物。 示例 3: 输入:command = “URR”, obstacles = [[4, 2]], x = 3, y = 2 输出:true 解释:到达终点后,再碰到障碍物也不影响返回结果。 限制: 2 <= command的长度 <= 1000 command由U,R构成,且至少有一个U,至少有一个R 0 <= x <= 1e9, 0 <= y <= 1e9 0 <= obstacles的长度 <= 1000 obstacles[i]不为原点或者终点
首先我们构建第一个功能,无限循环编程指令,以及加载起点
func robot(command string, obstacles [][]int, x int, y int) bool {
rx,ry:=0,0
for i:=0;i<len(command);i++{
switch command[i]{
case 'R':rx++;break;
case 'U':ry++;break;
}
//Some Code
if i==len(command)-1{
i=-1
}
}
}
到达终点的条件为rx,ry为函数传入函数的x,y
func robot(command string, obstacles [][]int, x int, y int) bool {
rx,ry:=0,0
for i:=0;i<len(command);i++{
switch command[i]{
case 'R':rx++;break;
case 'U':ry++;break;
}
if rx==x&&ry==y{
return true
}
//Some Code
if i==len(command)-1{
i=-1
}
}
}
接下来添加对障碍物的判断
func robot(command string, obstacles [][]int, x int, y int) bool {
rx,ry:=0,0
for i:=0;i<len(command);i++{
switch command[i]{
case 'R':rx++;break;
case 'U':ry++;break;
}
for i:=range obstacles{
if rx==obstacles[i][0]&&ry==obstacles[i][1]{
return false //即撞毁
}
}
if rx==x&&ry==y{
return true
}
if i==len(command)-1{
i=-1
}
}
}
其实此题的精髓并不是以上程序的构建,而是对障碍物剔除的逻辑 举个例子,对于终点以外的障碍物我们可以置之不理
即
if obstacles[i][0]>x||obstacles[i][1]>y{
obstacles=append(obstacles[i-1],obstacles[i+1]...)
}
且对于已经越过的点,若x或y小于当前坐标的障碍物一律可以剔除
例如下图
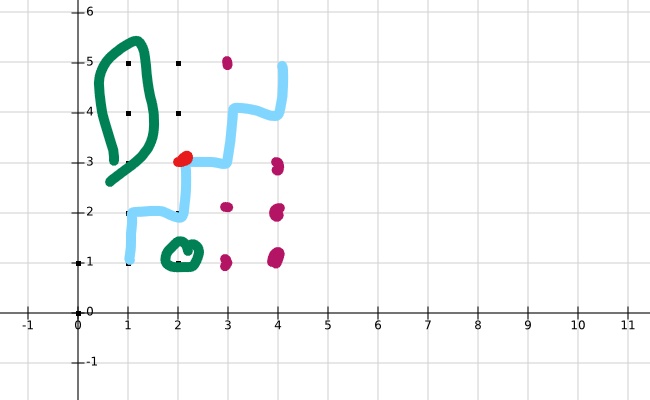 当我们位于红点时,绿点的障碍物是一定不会遇到的我们只需要对其剔除,可以大大缩减程序运行时间(
当我们位于红点时,绿点的障碍物是一定不会遇到的我们只需要对其剔除,可以大大缩减程序运行时间(当时在这里卡了好久
if obstacles[i][0]>x||obstacles[i][1]>y||(obstacles[i][0]==rx&&obstacles[i][1]<ry)||(obstacles[i][1]==ry&&obstacles[i][0]<rx)){
obstacles=append(obstacles[i-1],obstacles[i+1]...)
}
完整代码
func robot(command string, obstacles [][]int, x int, y int) bool {
rx,ry:=0,0
for i:=0;i<len(command);i++{
switch command[i]{
case 'R':rx++;break;
case 'U':ry++;break;
}
for i:=range obstacles{
if rx==obstacles[i][0]&&ry==obstacles[i][1]{
return false //即撞毁
}
if obstacles[i][0]>x||obstacles[i][1]>y||(obstacles[i][0]==rx&&obstacles[i][1]<ry)||(obstacles[i][1]==ry&&obstacles[i][0]<rx)){
obstacles=append(obstacles[i-1],obstacles[i+1]...)
}
}
if rx==x&&ry==y{
return true
}
if i==len(command)-1{
i=-1
}
}
return false
}
目前这道题思路改了,不再是设置海量的障碍物,而是将目的地数值设置巨大。
270 Words
2019-10-28 00:00